|
|

|

|
| e-Pub |
Section: New Results
Haptic Feedback and Physical Simulation
Haptic feedback to improve audiovisual experience
Participants : Fabien Danieau, Anatole Lécuyer [contact] .
Haptics have been employed in a wide set of applications ranging from teleoperation and medical simulation to arts and design, including entertainment, aircraft simulation and virtual reality. As for today, there is also a growing attention from the research community on how haptic feedback can be integrated with profit to audiovisual systems. We have first reviewed [19] the techniques, formalisms and key results on the enhancement of audiovisual experience with haptic feedback. We first reviewed the three main stages in the pipeline which are (i) production of haptic effects, (ii) distribution of haptic effects and (iii) rendering of haptic effects. We then highlighted the strong necessity for evaluation techniques in this context and discuss the key challenges in the field. By building on technology and results from virtual reality, and tackling the specific challenges in the enhancement of audiovisual experience with haptics, we believe the field presents exciting research perspectives for which financial and societal stakes are significant.
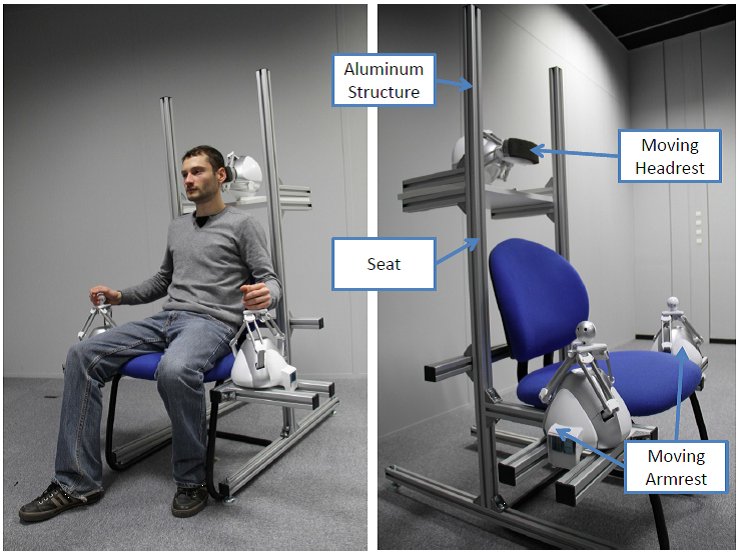
We have then developped a novel approach called HapSeat for simulating motion sensations in a consumer environment.Multiple force-feedbacks are applied to the seated user's body to generate a 6DoF sensation of motion while experiencing passive navigation as illustrated Figure 4 . A set of force-feedback devices such as mobile armrests or headrests are arranged around a seat so that they can apply forces to the user. The forces are computed consistently with the visual content (visual acceleration) in order to generate motion sensations. This novel display device has been patented and was demonstrated this year at ACM SIGGRAPH 2013 Emerging-Technologies [56] , and ACM CHI 2013 Interactivity [55] .
|
This work was a collaboration with the Mimetic team (Inria Rennes).
Vibrotactile rendering of splashing fluids
Participants : Anatole Lécuyer, Maud Marchal [contact] .
Compelling virtual reality scenarios involving physically based virtual materials have been demonstrated using hand- based and foot-based interaction with visual and vibrotactile feedback. However, some materials, such as water and other fluids, have been largely ignored in this context. For VR simulations of real-world environments, the inability to include interaction with fluids is a significant limitation. Potential applications include improved training involving fluids, such as medical and phobia simulators, and enhanced user experience in entertainment, such as when interacting with water in immersive virtual worlds. We introduced the use of vibrotactile feedback as a rendering modality for solid-fluid interaction, based on the physical processes that generate sound during such interactions [16] . This rendering approach enables the perception of vibrotactile feedback from virtual scenarios that resemble the experience of stepping into a water puddle or plunging a hand into a volume of fluid.
Six-DoF haptic interaction with fluids, solids, and their transitions
Participants : Anatole Lécuyer, Maud Marchal [contact] .
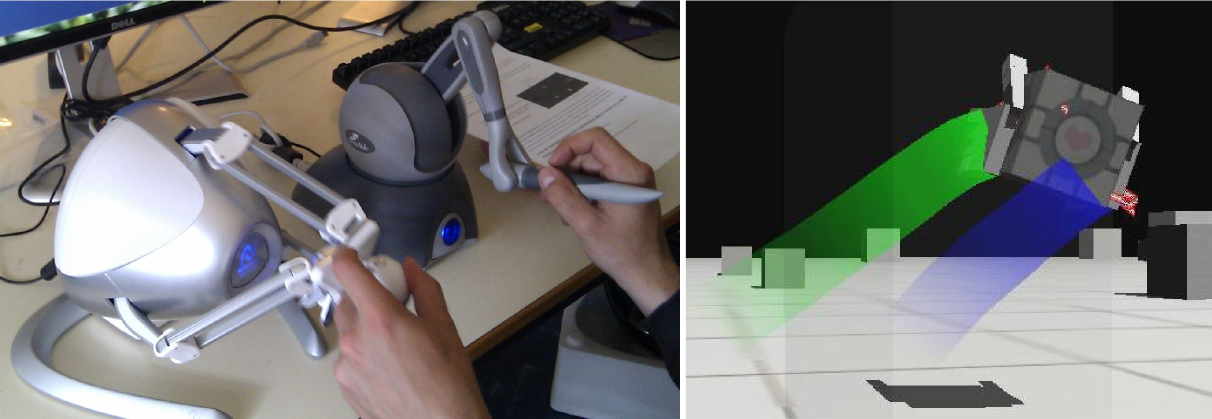
Haptic interaction with different types of materials in the same scene is a challenging task, mainly due to the specific coupling mechanisms that are usually required for either fluid, deformable or rigid media. Dynamically-changing materials, such as melting or freezing objects, present additional challenges by adding another layer of complexity in the interaction between the scene and the haptic proxy. We have addressed these issues through a common simulation framework, based on Smoothed-Particle Hydrodynamics, and enable haptic interaction simultaneously with fluid, elastic and rigid bodies, as well as their melting or freezing [31] . We introduced a mechanism to deal with state changes, allowing the perception of haptic feedback during the process, and a set of dynamic mechanisms to enrich the interaction through the proxy. We decouple the haptic and visual loops through a dual GPU implementation. An initial evaluation of the approach was performed through performance and feedback measurements, as well as a small user study assessing the capability of users to recognize the different states of matter they interact with.
Bimanual haptic manipulation
Participants : Anatole Lécuyer [contact] , Maud Marchal [contact] , Anthony Talvas.
Bimanual haptics is a specific kind of multi-finger interaction that focuses on the use of both hands simultaneously. Several haptic devices enable bimanual haptic interaction, but they are subject to a certain number of limitations for interacting with virtual environments (VEs), such as workspace size issues or manipulation difficulties, notably with single-point interfaces. Interaction techniques exist to overcome these limitations and allow users to perform specific two-handed tasks, such as the bimanual exploration of large VEs and grasping of virtual objects. We have proposed an overview of the current limitations in bimanual haptics and the interaction techniques developed to overcome them. Novel techniques based on the Bubble technique are more specifically presented, with a user evaluation that assesses their efficiency. These include bimanual workspace extension techniques as well as techniques to improve the grasping of virtual objects with dual single-point interfaces. This work was published as a chapter in a book on “Multi-finger Haptic Interaction” [52] .
The god-finger method
Participants : Anatole Lécuyer, Maud Marchal [contact] , Anthony Talvas.
In physically-based virtual environments, interaction with objects generally happens through contact points that barely represent the area of contact between the user's hand and the virtual object. This representation of contacts contrasts with real life situations where our finger pads have the ability to deform slightly to match the shape of a touched object. We have proposed a method called god-finger to simulate a contact area from a single contact point determined by collision detection, and usable in a rigid body physics engine [43] . The method uses the geometry of the object and the force applied to it to determine additional contact points that will emulate the presence of a contact area between the user's proxy and the virtual object. It could improve the manipulation of objects by constraining the rotation of touched objects in a similar manner to actual finger pads. An implementation in a physics engine shows that the method could make for more realistic behaviour when manipulating objects while keeping high simulation rates. This work was presented at IEEE 3DUI Symposium 2013 and has received the best technote award [43] .
Collision detection for fracturing rigid bodies
Participant : Maud Marchal [contact] .
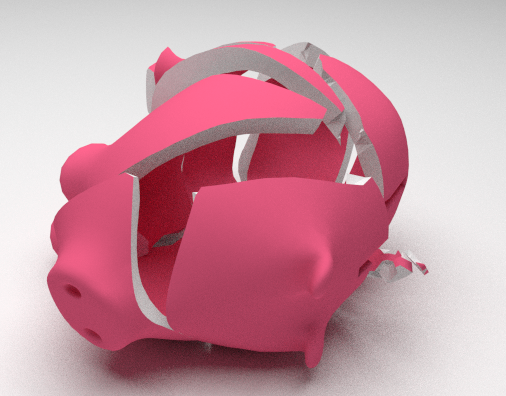
In complex scenes with many objects, collision detection plays a key role in the simulation performance. This is particularly true for fracture simulation, where multiple new objects are dynamically created. We have proposed novel algorithms and data structures for collision detection in real-time brittle fracture simulations [22] . We build on a combination of well-known efficient data structures, namely distance fields and sphere trees, making our algorithm easy to integrate on existing simulation engines. We proposed novel methods to construct these data structures, such that they can be efficiently updated upon fracture events and integrated in a simple yet effective self-adapting contact selection algorithm. Altogether, we drastically reduced the cost of both collision detection and collision response. We have evaluated our global solution for collision detection on challenging scenarios, achieving high frame rates suited for hard real-time applications such as video games or haptics. Our solution opens promising perspectives for complex brittle fracture simulations involving many dynamically created objects.
This work was a collaboration with the Mimetic team (Inria Rennes).
Collision detection with high performance computing on GPU
Participants : Bruno Arnaldi, Valérie Gouranton [contact] , François Lehericey.
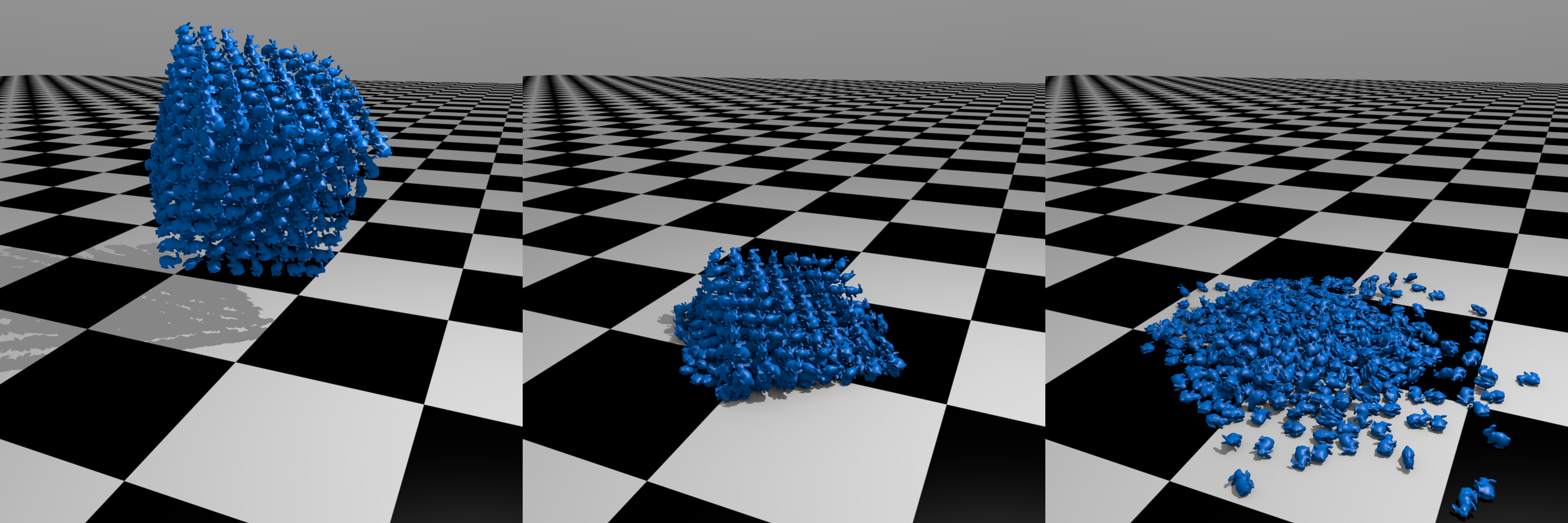
We have first proposed IRTCD, a novel Iterative Ray-Traced Collision Detection algorithm that exploits spatial and temporal coherency. Our approach uses any existing standard ray-tracing algorithm and we propose an iterative algorithm that updates the previous time step results at a lower cost with some approximations. Applied for rigid bodies, our iterative algorithm accelerate the collision detection by a speedup up to 33 times compared to non-iterative algorithms on GPU [35] .
Then, we have presented two methods to efficiently control and reduce the interpenetration without noticeable computation overhead. The first method predicts the next potentially colliding vertices. These predictions are used to make our IRTCD algorithm more robust to the approximations, therefore reducing the errors up to 91%. We also present a ray re-projection algorithm that improves the physical response of ray-traced collision detection algorithm. This algorithm also reduces, up to 52%, the interpenetration between objects in a virtual environment. Our last contribution showed that our algorithm, when implemented on multi-GPUs architectures, is far faster [36] .
Finally, we proposed a distributed and anticipative model for collision detection and propose a lead for distributed collision handling, two key components of physically-based simulations of virtual environments. This model is designed to improve the scalability of interactive deterministic simulations on distributed systems such as PC clusters. Our main contribution consists of loosening synchronism constraints in the collision detection and response pipeline to allow the simulation to run in a decentralized, distributed fashion. We could show the potential for distributed load balancing strategies based on the exchange of grid cells, and explain how anticipative computing may, in cases of short computational peaks, improve user experience by avoiding frame-rate drop-downs [32] .